Mechanical
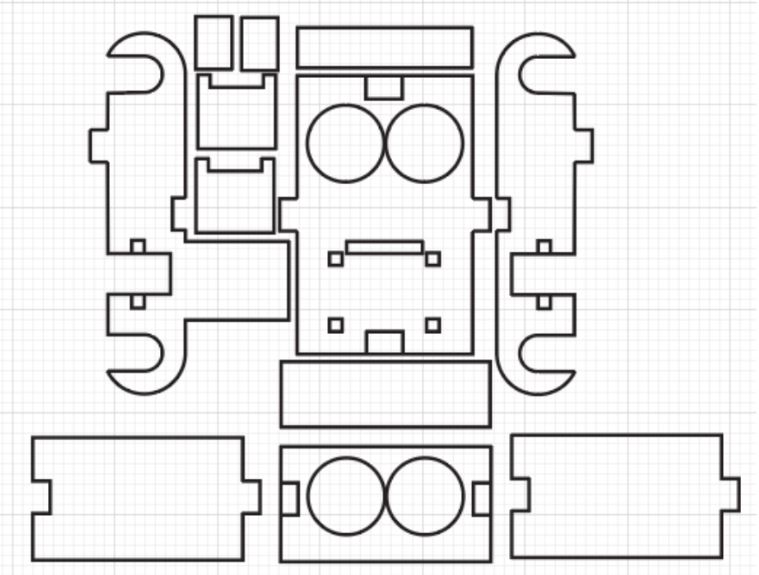
The mechanical systems involved in ArtBot including the gantry, and pen carriage.
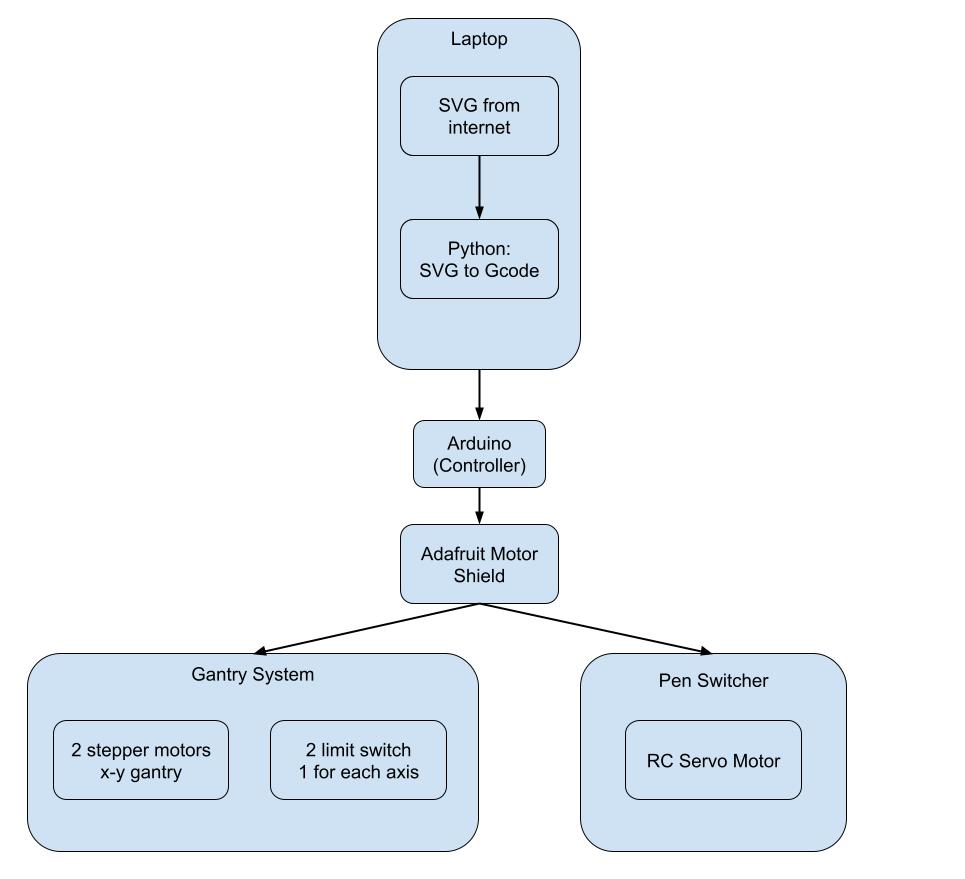
On a high level, ArtBot is a robot that uses a 2D gantry system to draw. It is controlled by an Arduino Uno that receives messages from a laptop, parses through them, and sends commands to two stepper motors within the gantry system. The stepper motors move a carriage that holds two markers along the x and y axes to create the drawing. The marker carriage is able to lift and lower the markers using a servo motor. This allows ArtBot to move the carriage to a new position without drawing on the paper, as most drawings have disconnected components, and to switch colors in the middle of a drawing. Our team also worked on computer vision and created an algorithm that can produce a webcam image, or use an existing photo, and extract the edges in that photo. That photo can then be used as the input to ArtBot to be drawn.
The mechanical systems involved in ArtBot including the gantry, and pen carriage.
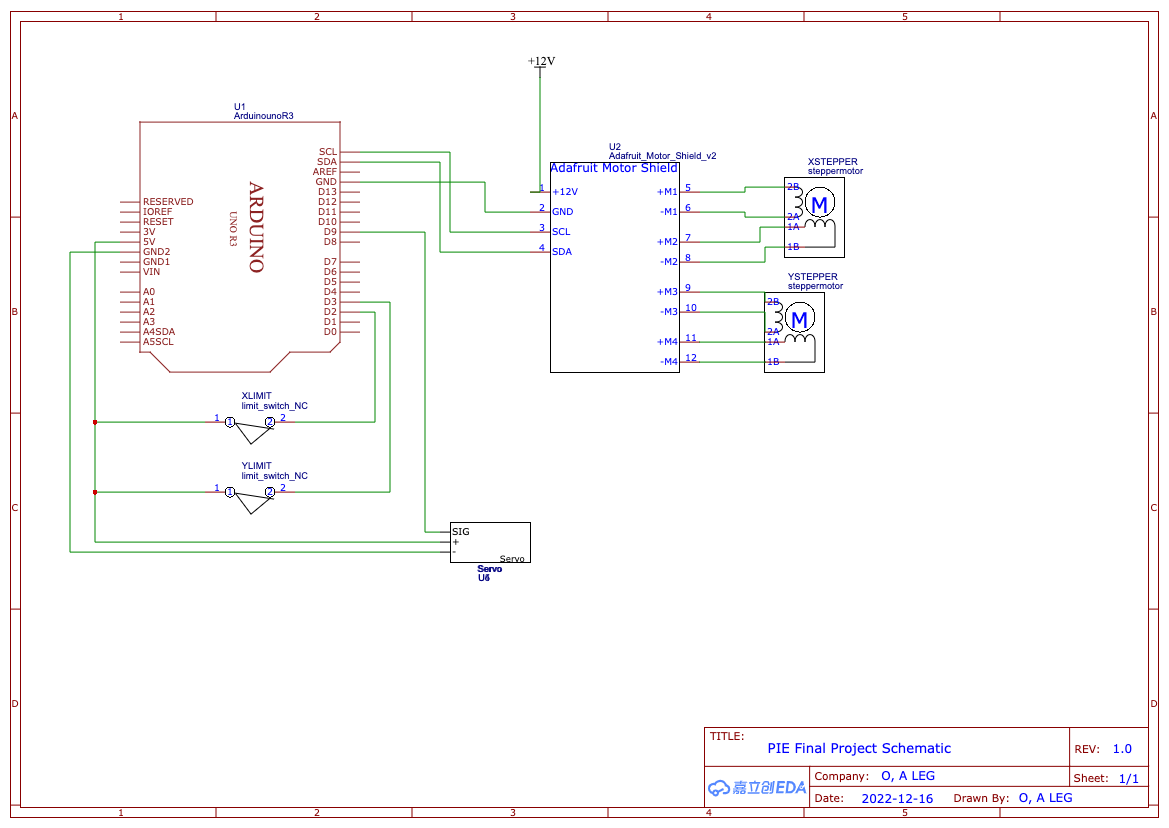
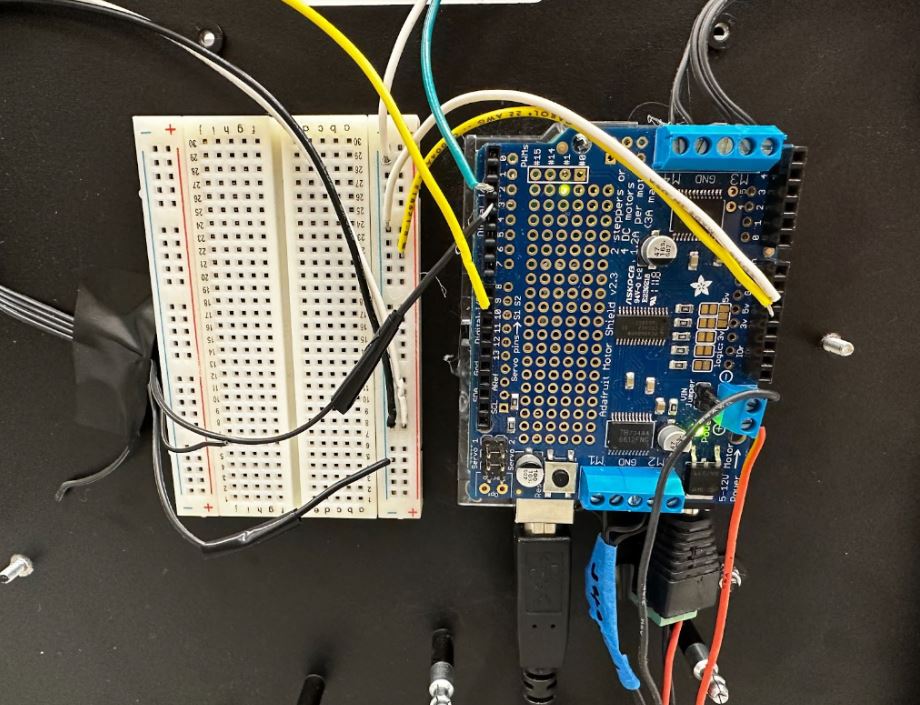
The electrical components of ArtBot and how they work together.
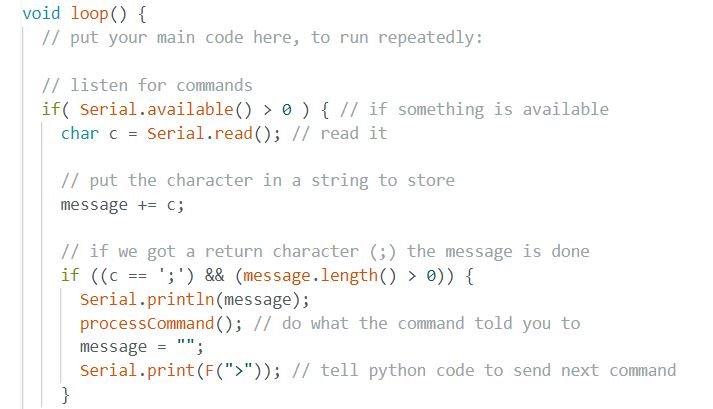
The software and firmware that gets ArtBot running.
What materials went into ArtBot, and their costs.
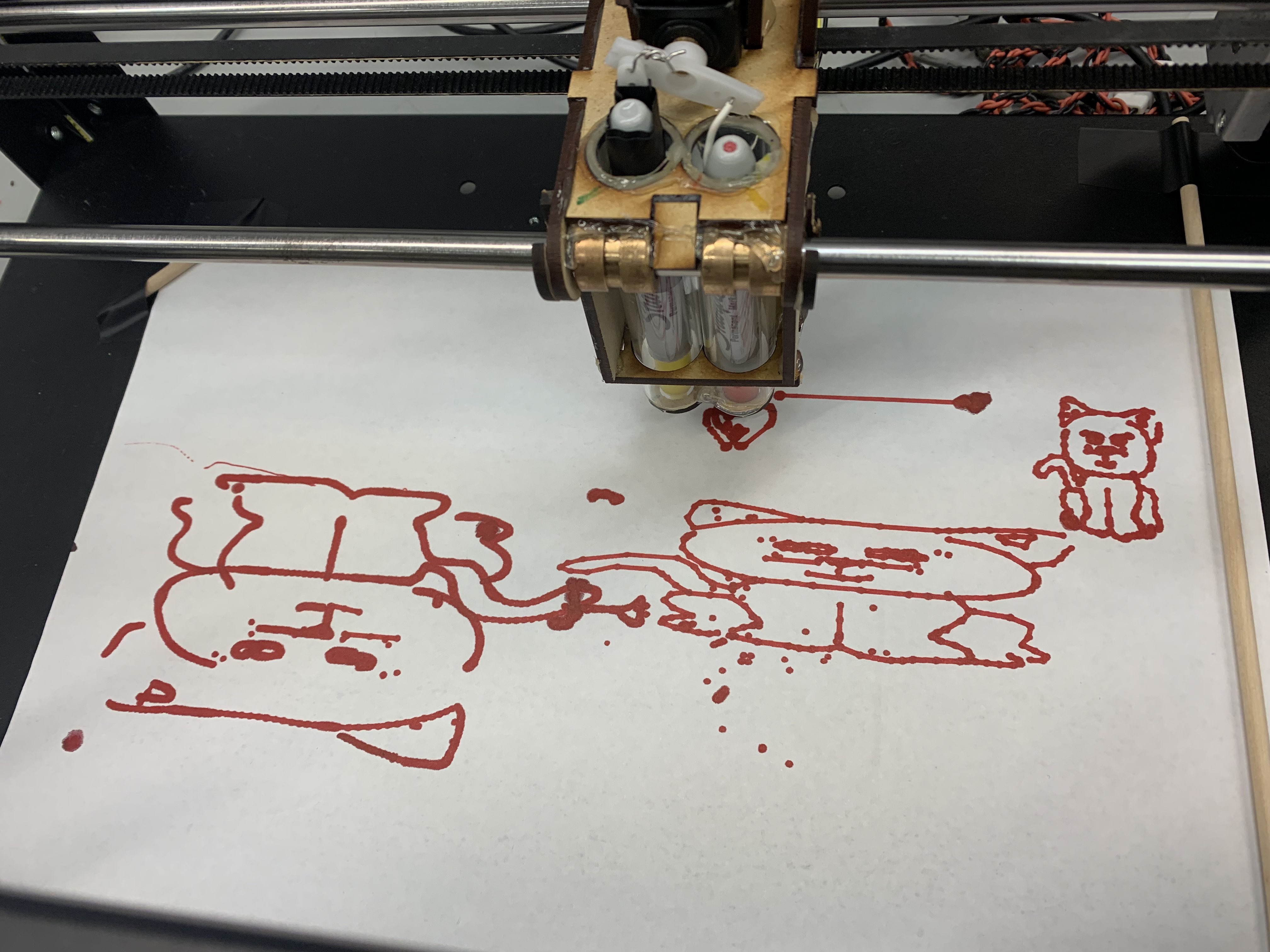
Photos and videos of our final system in action.